Prof. Dr.-Ing. Harald Sternberg

Hydrographie und Geodäsie
HafenCity Universität Hamburg
Henning-Voscherau-Platz 1
Raum 4.121
20457 Hamburg
E-Mail harald.sternberg(at)hcu-hamburg.de
Tel. +49 (0)40 42827 - 5300
Sprechzeiten WiSe 2023/24:
Freitags 12:00 - 13:00 Uhr mit Voranmeldung
| seit 11.2017 | Univ.-Prof. für Hydrographie und Geodäsie |
| 01.2009 - 09.2022 | Vizepräsident für Lehre und Studium der HafenCity Universität Hamburg |
| 02.2010 - 09.2010 | Kommissarischer Präsident der HafenCity Universität Hamburg |
| 04.2009 - 10.2017 | Univ.-Prof. für Ingenieurgeodäsie und geodätische Messtechnik |
| 05.2006 - 01.2009 | Sprecher des Department Geomatik, HafenCity Universität Hamburg |
| 01.2006 - 03.2009 | Professur für Ingenieurgeodäsie, HafenCity Universität Hamburg, Department Geomatik |
| 06.2005 - 05.2006 | Dekan des Fachbereichs Geomatik, Hochschule für Angewandte Wissenschaften Hamburg |
| 08.2001 - 12.2005 | Professur für Ingenieurgeodäsie, Hochschule für Angewandte Wissenschaften Hamburg, Fachbereich Geomatik |
| 14.09.1999 | Promotion zum Dr.-Ing. an der Universität der Bundeswehr München mit der Dissertation: "Zur Bestimmung der Trajektorie von Landfahrzeugen mit einem hybriden Meßsystem" |
| 1996 - 2001 | Wissenschaftlicher Assistent am Institut für Geodäsie der Universität der Bundeswehr München |
| dabei internationale Messkampagnen: mit GPS zur Bestimmung des Höhenprofils eines Flusssystems (Botswana) und Kreiselmessungen zur Vortriebskontrolle (Zürich, Schweiz; CERN, Genf; Amman, Jordanien) | |
| 1991 - 1996 | Wissenschaftlicher Mitarbeiter am Institut für Geodäsie der Universität der Bundeswehr München |
| 1987 - 1991 | Truppendienstliche Tätigkeit als Artillerieoffizier |
| 1983 - 1986 | Studium Vermessungswesen, Universität der Bundeswehr München |
2023
Askar, C., Barnefske, E., Hellweg, N., Stojanovic, V., Konkova, O. Sternberg, H. 2023
Semantically-Rich Floorplans from Indoor Point Clouds; in: Ingenieurvermessung 23 Beiträge zum 20. Internationalen Ingenieurvermessungskurs Zürich, Hrsg.: Andreas Wieser, Wichmann Verlag ISBN/EAN: 9783879077342
Askar, C., Scheider, A., Sternberg, H. 2023
Evaluation of a State-of-the-Art Indoor Mobile Mapping System in a Complex Indoor Environment, zfv 99999/2023 148. Jg. Wißner-Verlag, DOI 10.12902/zfv-0445-2023
Askar, C., Sternberg, H. 2023
Use of Smartphone Lidar Technology for Low-Cost 3D Building Documentation with iPhone 13 Pro: A Comparative Analysis of Mobile Scanning Applications, Geomatics 2023, 3(4), 563-579; doi.org/10.3390/geomatics3040030
Bernfeske, E, Sternberg, H. 2022
Evaluation of Class Distribution and Class Combinations on Semantic Segmentation of 3D Point Clouds with PointNet, IEEE Access 11(99):1-1; DOI: 10.1109/ACCESS.2022.3233411
Hellweg, N., Barnefske, E., Sternberg, H. 2023
Einsatz von Game Engines zur Entwicklung dynamischer Umgebungen für die Indoor-Navigation, 22. Internationale Geodätische Woche, Obergurgl, 02/2023. Hrsg.: Thomas Weinold, Wichmann, VDE Verlag GmbH, Berlin und Offenbach, ISBN 978-3-87907-738-0, E-Book: ISBN 978-3-87907-739-7
Klatt, L. Schild, N., Sternberg, H. 2023
Senses for Submarines: Concepts for Optical- and Acoustic-Based Odometry and SLAM for Underwater Navigation (12148). Proceedings of FIG Working Week 2023, Orlando, Florida, USA, 28 May–1 June 2023, FIG, ISBN 978-87-93914-07-0, ISSN 2308-3441
Muhammad, F., Poerbandono P., Sternberg, H., Djunarsjah, E., Abidin, H., 2023
Underwater imaging dataset in a very shallow water environment of Pramuka Island, Seribu Island District, Indonesia (2023-07-27), Data in Brief Journal, Elsevier, Data in Brief 49(1):109448, DOI: 10.1016/j.dib.2023.109448
Scheider, A., Barnefske. E, Sternberg, E. 2023
FOS-Based Monitoring of Underwater Port Structures (12160), Proceedings of FIG Working Week 2023, Orlando, Florida, USA, 28 May–1 June 2023 FIG ISBN 978-87-93914-07-0, ISSN 2308-3441
Schild, N.M., Klatt, L., Kraft, M, Sternberg, H. 2023
Autonome Unter-Wasser-Fahrzeuge für das hydrographische Monitoring von kritischen Infrastrukturen, Hydrographische Nachrichten, HN 125, DOI: 10.23784/HN125-08
Shoushtari, H., Harder, D., Kasparek, M., Müller-Lietzkow, J., Sternberg, H. 2023
Data-Driven Inertial Navigation assisted by UL-TDOA 5G Positioning, International technical Meeting (ITM), institute of Navigation (ION), Long Beach, CA, January 23-26. www.ion.org/itm/abstracts.cfm
Shoushtari, H., Harder, D., Willemsen, T., Sternberg, H. 2023
Optimierte Trajektorie aus Smartphone-Sensoren und 5G UL-TDoA mit Cluster Partikel Filter, in: Ingenieurvermessung 23 - Beiträge zum 20. Internationalen Ingenieur-vermessungskurs Zürich, Hrsg.: Andreas Wieser, Wichmann Verlag ISBN/EAN: 9783879077342
Shoushtari, H., Willemsen, T., Sternberg, H. 2023
Supervised Learning Regression for Sensor Calibration, 2023 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 2023, pp. 1-20, doi: 10.1109/ISS58390.2023.10361922.
Werner, E., Adhikari, D., Klatt, L., Sternberg, H. 2023
Going deep: Hydrography at HafenCity University Hamburg
Nurturing Knowledge and Innovation for the Maritime Sector
Hydro International, p.12-15, Volume 27, Issue 3, 2023, Geomares
2022
Barnefske, E., Sternberg, H., 2022
Evaluating the Quality of Semantic Segmented 3D Point Clouds
MDPI, January 2022 https://doi.org/10.3390/rs14030446
Harder, D., Shoushtari, H., Sternberg, H., 2022
Real-Time Map Matching with a Backtracking Particle Filter Using Geospatial Analysis
MDPI, April 2022 https://doi.org/10.3390/s22093289
Ibrahim, P.O., Sternberg, H.,Samaila-ija, H.A., Adgidzi, D., Nwadialor, J.I., 2022
Modelling topo-bathymetric surface using a triangulation irregular network (TIN) of Tunga Dam in Nigeria,
Journal Applied Geomatics https://doi.org/10.1007/s12518-022-00438-y
Schuldt, C., Hellweg, N., Dieck, M., Rittenbach, J., Sternberg, H., 2022
Eine BIM-basierte Geodatenbank zur Nutzung in der Indoor-Navigation,
gis.Science 3 (2022) 109-116
Lütjens, M., Sternberg, H., 2022
Hydrographic education and research at the HafenCity University Hamburg
Hydrographische Nachrichten, HN 123 11/2022, p.20-24, https://doi.org/10.23784/HN123-03
Barnefske, E., Sternberg, H. 2022
Automatisch semantisch-segmentierte Punktwolken – Möglichkeiten und Herausforderungen
(MST 2022 – Multisensortechnologie: Von (A)nwendungen bis (Z)ukunftstechnologien)
Beiträge zum 213. DVW-Seminar am 26. und 27. September 2022 in Hamburg,
Schriftenreihe des DVW, Band 103/2022, ISBN: 978-3-95786-322-5
Shoushtari, H., Kassawat, F., Harder, D., Venzke, K., Müller-Lietzkow, J., Sternberg, H., 2022
L5IN + : From an Analytical Platform to Optimization of Deep Inertial Odometry,
IPIN2022 September 5-7 2022, Beijing, China
2021
Ibrahim, P.O., Sternberg, H., 2021
Bathymetric Survey for Enhancing the Volumetric Capacity of Tagwai Dam in Nigeria via Leapfrogging Approach; MDPI Journal https://www.mdpi.com/2673-7418/1/2/246
Schuldt, C., Shoushtari, H., Hellweg, N., Sternberg, H., 2021
L5IN: Overview of an Indoor Navigation Pilot Project
Remote Sens. 2021, 13(4), 624; https://doi.org/10.3390/rs13040624
Shoushtari, H., Willemsen, T., Sternberg, H., 2021
Many Ways Lead to the Goal—Possibilities of Autonomous and Infrastructure-Based Indoor Positioning
Electronics 2021, 10(4), 397; https://doi.org/10.3390/electronics10040397
Hellweg, N., Schuldt, C., Shoushtari, H., Sternberg, H., 2021
Potenziale für Anwendungsfälle des Facility Managements von Gebäuden durch die Nutzung von Bauwerksinformationsmodellen als Datengrundlage für Location-Based Services im 5G-Netz
21. Internationale Geodätische Woche, Obergurgl 02/2021,
Wichmann, VDE Verlag GmbH, Berlin und Offenbach ISBN 9783879077021
Lütjens, M., Sternberg, H., 2021
Deep learning-based classification of marine images and the effect of data-driven influences,
Hydrographische Nachrichten, HN 119 06/2021, https://DOI.org/10.23784/HN119-02
Stojanovic, V., Shoushtari, H., Askar, C., Scheider, A., Schuldt, C., Hellweg, N., Sternberg, H., 2021
A Conceptual Digital Twin for 5G Indoor Navigation, Conference: MOBILITY 2021,
The Eleventh International Conference on Mobile Services, Resources and Users
Leiseder, K., Shoushtari, H., Willemsen , T., Bagherbandi, M., Sternberg, H. , 2021
Ubi-T: Smart Surveying Instrument Using Ubiquitous Computing Concept (10954)
FIG Working Week 2021, 20th - 25th June 2021, Amsterdam/online
Lütjens, M., Sternberg, H., 2021
Deep Learning based Detection, Segmentation and Counting of Benthic Megafauna in Unconstrained Underwater Environments,
13th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles, open-access IFAC-PapersOnLine series hosted on ScienceDirect
Muhammad, F., Poerbandono, Sternberg, H., 2021
Controlled experiment of underwater vision-based mapping: A preliminary evaluation,
IOP Conference Series: Earth and Environmental Science, Volume 925, 3rd International Conference on Maritime Sciences and Advanced Technology, 5-6 August 2021, Indonesia (virtual)
https://iopscience.iop.org/article/10.1088/1755-1315/925/1/012054
Shoushtari, H., Askar, C., Harder, D., Willemsen, T., Sternberg, H., 2021
3D Indoor Localization using 5G-based Particle Filtering and CAD Plans,
IPIN 29.11.-.03.12.2021, Lloret de Mar, Spain
https://ieeexplore.ieee.org/xpl/conhome/9662499/proceeding
Hellweg, N., Schuldt, C., Shoushtari, H., Müller-Lietzkow, J., Sternberg, H., 2021,
5G based Indoor Navigation at HafenCity University Hamburg
27th ITS World Congress, Hamburg, Germany, 11-15 October 2021
https://www.researchgate.net/publication/358522733_5G_based_Indoor_Navigation_at_HafenCity_University_Hamburg
2020
Makiello, L., Sternberg, H. 2020
Using a ROS-Based Low-Cost System for Bathymetric Surveys (10470),
FIG Working Week 2020, May 2020, Amsterdam, The Netherlands
www.fig.net/fig2020/technical_program.htm
Ibrahim, P. O., Sternberg, H. 2020
Evaluation of Exponential Factor on Boundary Value Problem of Inverse Distance Weighting Method of Interpolation (10401), FIG Working Week 2020, May 2020, Amsterdam, The Netherlands www.fig.net/fig2020/technical_program.htm
Makiello, L., Sternberg, H. 2020
Using a ROS-based low-cost System for bathymetric surveys,
Hydrographische Nachrichten, HN116 - 06/2020, DOI: 10.23784/HN116-0X
Barnefske, E., Sternberg, H. 2020
Klassifizierung von fehlerhaft gemessenen Punkten in 3D-Punktwolken mit ConvNet Ingenieurvermessungskurs 2020, Herbert Wichmann Verlag.
Barnefske, E., Ohlendieck, J., Sternberg, H. 2020
Modellierung der Deformation eines Stahlträgers durch indirekte Dehnungsmessungen,
Tagungsband GeoMonitoring 2020, 93 -103
2019
Acevedo Pardo, C., Farjas Abadía, M., Sternberg, H. 2019
Development of a Mobile Mapping System for Multi-Purpose Applications Composed of a Low-Cost Inertial Measuring Unit, a GNSS-Receiver and a Close-Range LIDAR; Proceeding of The II Geomatics Engineering Conference, CIGeo 2019, Proceedings 2019, 19(1), 9; doi:10.3390/proceedings2019019009
Sternberg, H., Kraft, M. 2019
Optimizing a Low-cost Multi Sensor System for Hydrographic Depth Determination, Hydro international | march/april 2019 p. 31 ff
Mechelke, K., Burkhardt, S., Eisele, G., Illguth, M., Schnelle, M., Sternberg, H. 2019
Geodetic Monitoring and Structural Analysis on the Great Temple of Yeha, Ethiopia Jisdm 2019, 4th Joint International Symposium on Deformation Monitoring,
15.-17.05.2019 Athens, Greece; proceedings https://jisdm2019.org/wp-content/uploads/2019/05/JISDM2019-Proceedings.pdf
Barnefske, E., Sternberg, H., Linzer, F. 2019
Konzeption eines modularen MMS innerhalb der Robotic Operating System (ROS)- Umgebung im zur Produktion von Stadtmodellen. In Hanke/Weinhold (Hrsg.) 20. Internationale Geodätische Woche, Obergurgl, 02/2019. Wichmann, VDE Verlag GmbH, Berlin und Offenbach, ISBN: 978-3-87907-659-8.
Stoeck, J., Willemsen, T., Sternberg, H. 2019
Low-Cost Sensormodul zur Verknüpfung terrestrischer Laserscans,
Oldenburger 3D-Tage Februar 2019, Optische 3D-Messtechnik - Photogrammetrie – Laserscanning
Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach
ISBN 978-3-87907-660-4
Linzer, F., Barnefske, E., Sternberg, H. 2019
Robot Operating System zur Steuerung eines Modularen Mobile-Mapping-Systems – Aufbau, Validierung und Anwendung. (peer-reviewed)
avn Ausgabe 126 (2019) 1-2, Wichmann Verlag im VDE VERLAG GMBH, Berlin
https://gispoint.de/artikelarchiv/avn/2019/avn-ausgabe-1-22019/4645-robot-operating-system-zur-steuerung-eines-modularen-mobile-mapping-systems-aufbau-validierung-und-anwendungen.html
Barnefske, E., Sternberg, H. 2019
Generation of Training Data für 3D Point Cloud Classification by CNN.
FIG Working Week 2019, 22th – 26th April 2019, Hanoi, Vietnam
https://www.fig.net/resources/proceedings/fig_proceedings/fig2019/papers/ts02c/TS02C_barnefske_sternberg_9881.pdf ISBN 978-87-92853-90-5 ISSN 2307-4086
Sternberg, H., Lütjens, M., Täuber, F., Basan, F., Duncan, B. 2019
Insights into current research methods of 3D Data Acquisition and 3D Visualization in Hydrography at HafenCity University Hamburg (peer-reviewed),
avn Ausgabe 5/2019, Seiten 123-135, Wichmann Verlag im VDE VERLAG GMBH, Offenbach
https://gispoint.de/artikelarchiv/avn/2019/avn-ausgabe-52019/4704.html
Sternberg, H. 2019
Die Hydrographie im Aufwind
avn Ausgabe 5/2019, Editorial, Wichmann Verlag im VDE VERLAG GMBH, Offenbach
Stoeck, J., Sternberg, H. 2019
Navigation in a library using Smartphones
4th KuVS/GI Expert Talk on Localization 2019, Lübeck 11.-12 July 2019
https://publikationsserver.tu-braunschweig.de/servlets/MCRFileNodeServlet/dbbs_derivate_00045504/EToL_proceedings.pdf#page=21
Barnefske, E., Sternberg, H. 2019
PCCT: A Point Cloud Classification Tool To Create 3D Training Data To Adjust And Develop 3D ConvNet, Photogrammetric Image Analysis (PIA19) and Munich Remote Sensing Symposium (MRSS19).
München 18.-20. September 2019 https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLII-2-W16/35/2019/isprs-archives-XLII-2-W16-35-2019.pdf
Stoeck, J., Sternberg, H. 2019
Indoor navigation for a library
Short Paper Proceedings of the Tenth International Conference on Indoor Positioning and Indoor Navigation - Work-in-Progress Papers (IPIN-WiP 2019)
co-located with the 10th International Conference on Indoor Positioning and Indoor Navigation (IPIN 2019), 30th September – 3rd October 2019, Pisa, Italy http://ceur-ws.org/Vol-2498/short19.pdf
2018
Sternberg, H. 2018
Vermessung und Ortung mit Satelliten. Globales Navigationssatellitensystem (GNSS) und andere satellitengestützte Navigationssysteme. Autor: Manfred Bauer [Buchbesprechung]
Wichmann Verlag, 7., neu bearbeitete und erweiterte Auflage 2018, 566 Seiten, 170 × 240 mm, Broschur, ISBN 978-3-87907-634-5, E-Book: ISBN 978-3-87907-635-2
avn: http://www.vermessung-und-ortung-mit-satelliten.de/pdf/rezension_a7_avn.pdf
Sternberg, H., Dufek, T. 2018
30+ years of hydrographic education - Category A Programme of Hamburg’s HafenCity University
Hydro International, Volume 22, Number 3, May-June 2018
https://www.hydro-international.com/content/article/30-years-of-hydrographic-education
Dufek, T., Sternberg, H. 2018
Unbemannte Multisensorsysteme und Nutzungsmöglichkeiten in der Hydrographie
DVW e.V.b (Hrsg.): Hydrographie 2018 - Trend zu unbemannten Messsystemen.
DVW-Schriftenreihe, Band 91, Wißner-Verlag, Augsburg, S. 9-28
Askar, C., Dufek, T., Sternberg, H., 2018
Individual recognition schemes in hydrography
Hydrographische Nachrichten, HN 111, DOI: 10.23784/HN111-09
Stoeck, J., Sternberg, H. 2018
Concept for real-time localization based on smartphone camera and IMU,
3rd KuVS/GI Expert Talk on Localization, 12.-13. Juli 2018 Lübeck
https://publikationsserver.tu-braunschweig.de/receive/dbbs_mods_00065890
Sternberg, H. 2018
Der Hydrograph lebt davon, dass andere mit ihm im Austausch stehen
Wissenschaftsgespräch in Hydrographische Nachrichten/Journal of Applied Hydrography 06/2018,
DOI: 10.23784/HN110-06
Blankenbach, J., Sternberg, H., Tilch, S. 2018
Indoor-Positionierung. Ingenieurgeodäsie, Handbuch der Geodäsie, herausgegeben von Willi Freeden und Reiner Rummel, Verlag Springer Spektrum, Springer Reference Naturwissenschaften, Willfried Schwarz (Hrsg.), ISBN: 978-3-662-47187-6
Linzer, F., Barnefske, E., Sternberg, H. 2018
Konzeption eines modularen MMS innerhalb der Robotic Operating System (ROS)- Umgebung im geodätischen Zusammenhang. 17. Oldenburger 3 D Tage 2018, Photogrammetrie-Laserscanning Optische 3D-Messtechnik
Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach
Kunde, T., Held, P., Sternberg, H., Schneider von Deimling, J. 2018
Ammunition detection using high frequency multibeam snippet backscatter Information
Marine Pollution Bulletin 133 (2018) 481-490, https://doi.org/10.1016/j.marpolbul.2018.05.063
Jensen, E., Barnefske, E., Sternberg, H. 2018
Multisensorsysteme mit MEMS-Sensoren am Beispiel der Bestimmung von Gap-Filler-Breiten,
zfv, Heft 3/2018, 143. Jahrgang (Seiten 172–176), Wißner Verlag, DOI 10.12902/zfv-0209-2018
Barnefske, E., Sternberg, H. 2018
Spezielle Vermessungslösungen für den barrierefreien Ausbau einer Haltestelle der Hamburger Hochbahn (MST 2018 – Multisensortechnologie: Low-Cost Sensoren im Verbund).
176. DVW-Seminar 13.-14.09.2018, Hamburg, Schriftenreihe des DVW, Band 92/2018
Sternberg, H., Dufek, T., Kinne, S., Wölfl, A-C., 2018
AtlantOS data products from multibeam EM122 data: SONNE cruise SO259/2 (Atlantic). PANGAEA, https://doi.pangaea.de/10.1594/PANGAEA.893330
Sternberg, H., Dufek, T., Kinne, S., Wölfl, A-C., 2018
AtlantOS data products from multibeam EM122 data: SONNE cruise SO259/3 (Atlantic). PANGAEA, https://doi.pangaea.de/10.1594/PANGAEA.893332
Sternberg, H., Dufek, T. 2018
Hydrographieausbildung an der HafenCity Universität Hamburg,
Hydrographische Nachrichten, Journal of Applied Hydrography 02/2018,
DOI: 10.23784/HN109-04
2017
Sternberg, H., Willemsen, T. 2017
Ein topologischer Ansatz zur Innenraumnavigation mit MEMS in Smartphones basierend
auf dem Routing-Graph. 19. Internationale Geodätische Woche, Obergurgl 2017
in Hanke/Weinhold (Hrsg.), Wichmann, VDE Verlag GmbH, ISBN: 978-3-87907-624-6
Willemsen, T., Eppinger, G., Sternberg, H. 2017
MEMS in der Ingenieurgeodäsie - Low-Cost-Sensorik zur Bewältigung komplexer Aufgaben,
18. Intern. Ingenieurvermessungskurs 25.-29.04.2017, TU Graz Österreich, (peer-reviewed),
W. Lienhart (Hrsg.) Ingenieurvermessung17, Herbert Wichmann Verlag, ISBN: 978-3-87907-630-7
Barnefske, E., Keller, F., Klimaschewski, A., Schramme, K., Bögle, A., Sternberg, H. 2017
Modellierung und Laboruntersuchung der Dämpfung von Faser-Bragg-Gitter-Sensoren (FBG) in Membran-Fassadenelementen mit einem photogrammetrischen Dehnungsmesssystem,
zfv, Heft 5/2017, 142. Jahrgang, Wißner Verlag, DOI 10.12902/zfv-0170-2017
Wolf, M., Breckner, I., Sternberg, H. 2017
[Q]Studies, Basics and Skills: Increasing Methodological Competencies,
Perspectives in Metropolitan Research/ Science and the City: Hamburg's Path to a Built Environment Education, W. Pelka & F. Kasting (Hrsg.), Jovis Verlag GmbH Berlin, ISBN 978-3-86859-458-4
Sternberg, H., Willemsen, T. 2017
Position estimation based on MEMS inertial sensors for the use as pedestrian navigation
79th FIG Working Week, 29th May - 2nd June 2017, Helsinki, Finnland (peer-reviewed)
http://www.fig.net/resources/publications/pri/showpeerreviewpaper.asp?pubid=8558
ISBN 978-87-92853-61-5 (Online) ISBN 978-87-92853-62-2 (Printed)
Schmitt, S., Zech, L., Wolter, K., Willemsen, T., Sternberg, H., Kyas, M. 2017
Fast Routing Graph Extraction from Floor Plans,
International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2017,
Sapporo, Japan, 18-21 September 2017
http://ieeexplore.ieee.org/document/8115868/ DOI 10.1109/IPIN.2017.8115868
Dufek, T., Sternberg, H. 2017
Hydrographic Education (FIG/IHO/ICA Category A) at the HafenCity University Hamburg (HCU),
Hydro 2017, 13.-16.11.2017, Rotterdam, Netherlands http://hydro17.com/programme
Diederichs, S., Sternberg, H. 2017
Development of a low-cost multi-sensor for recording shallow water depths,
Hydro 2017, 13.-16.11.2017, Rotterdam, Netherlands http://hydro17.com/programme
2016
Willemsen, T., Bornholdt, M., Keller, F., Sternberg, H. 2016
Untersuchungen zum Einsatz eines MEMS MPU-6050 zur Neigungsmessung
Oldenburger 3D-Tage 2016, Photogrammetrie-Laserscanning Optische 3D-Messtechnik
Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach
Eppinger, G., Keller, F., Sternberg, H. 2016
Geosensornetzwerk mit Radartechnik
GeoMonitoring 2016, March 3-4, Braunschweig, Germany
Tagung 2016 über TU Braunschweig, www.geo-monitoring.org/
Alkaiem, L., Keller, F., Sternberg, H. 2016
Analysis of inclination measurement by means of artificial neural Networks - A comparison of static and dynamic networks (reviewed), 3rd JISDM 2016, March 29-31, Vienna, Austria
http://jisdm2016.org/sites/all/themes/Ibs2014/Programm_end.pdf
Kupke, J., Willemsen, T., Keller, F., Sternberg, H. 2016
Development of a Step Counter based on Artificial Neural Networks
Journal of Location Based Services, April 2016 (peer-reviewed)
DOI: 10.1080/17489725.2016.1196832
Barnefske, E., Keller, F., Gehmert, C., Sternberg, H. 2016
A Comparison of Strain Measurement Systems in a Tensile Experiment
78th FIG Working Week 2016, May 2-6, New Zealand, Australia
http://www.fig.net/resources/proceedings/fig_proceedings/fig2016/techprog.htm
Blankenbach, J., Sternberg, H., Tilch, S. 2016
Indoor-Positionierung
Handbuch der Geodäsie, Band "Ingenieurgeodäsie" Hrsg. Schwarz.
DOI: 10.1007/978-3-662-46900-2_24-1
Schmitt, S., Willemsen, T., Sternberg, H., Kyas, M. 2016
Conditional Erosion to estimate Routing-Edges out of Ground Plans
International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2016,
Alcala de Henares, Spain, 4-7 October 2016 (peer-reviewed)
http://ieeexplore.ieee.org/document/7743602, IEEE, DOI: 10.1109/IPIN.2016.7743602
2015
Acevedo, Pardo, C., Farjas Abadía, M., Sternberg, H. 2015
Design and Development of a low-cost Aerial Mobile Mapping System for Multi-Purpose Applications
International Conference on Unmanned Aerial Vehicles in Geomatics 2015 (UAV-g 2015),
August 30 - September 2, Toronto, Ontario, Canada
Keller, F., Willemsen, T., Sternberg, H. 2015
Indoor Positioning and Mapping with a Research System, Evaluation of Extended and Unscented Kalman Filters and different System Models. The 9th International Symposium on Mobile Mapping Technology (MMT 2015), December 9-11, Sydney, Australia
Acevedo Pardo, C., Schulz, J., Schramm, T., Zobel, K., Farjas Abadía, M., Sternberg, H. 2015
Design und Entwicklung eines low-cost modular Aerial Mobile Mapping Systems
Oldenburger 3D-Tage 2015, Photogrammetrie-Laserscanning Optische 3D-Messtechnik
Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, ISBN: 9783879075287
Willemsen, T., Keller, F., Sternberg, H. 2015
Kartengestützte MEMS-basierte Indoorpositionierung mittels Partikel-Filter
Oldenburger 3D-Tage 2015, Photogrammetrie-Laserscanning Optische 3D-Messtechnik
Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, ISBN: 9783879075287
Leitz, S., Keller, F., Willemsen, T., Sternberg, H., Kagerah, S. 2015
Development of a WiFi-Fingerprinting for position determination by mean of probabilistic methods
FIG Working Week 2015, May 17-21, Sofia, Bulgaria
Sternberg, H., Keller, F., Willemsen, T. 2015
Einsatz von MEMS Inertial-Sensoren für die Orientierung in Gebäuden
145. DVW-Seminar: Interdisziplinäre Messaufgaben im Bauwesen, 26.-27. März 2015, Darmstadt,
Schriftenreihe des DVW, Band 79, Wißner-Verlag, ISBN: 9783957860460
Sternberg, H., Keller, F., Leitz, S., Kagerah, S., Thie, G. 2015
Aktuelle Entwicklungen des HCU 'Mobile Mapping Systems' und dessen Einsatz in der Forschung und in der Lehre, 18. Internationale Geodätische Woche Obergurgl, Österreich, 08.-14. Februar 2015,
Hanke/Weinhold (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, ISBN-13: 9783879075546
Keller, F., Kagerah, S., Sternberg, H. 2015
Automatisierung eines Low-Cost-360° Reflektors für die genaue Positionierung einer 3D-Trajektorie
avn Ausgabe 8-9/2015, Wichmann Verlag im VDE Verlag GmbH, Offenbach
http://gispoint.de/artikelarchiv/avn/2015/avn-ausgabe-08-092015.html
Willemsen, T., Keller, F., Sternberg, H. 2015
A topological Approach with MEMS in smartphones based on routing-graph
International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2015
http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=7346952&filter=AND%28p_Publication_Number:7336693%29; IEEE, DOI: 10.1109/IPIN.2015.7346952
2014
Acevedo Pardo, C., Sternberg, H., Willemsen, T., Romero Calvo, C. und Crespo Sanchidrián, R. 2014
Schadensdokumentation der "Kleine Schleuse" am Nord-Ostsee-Kanal in Kiel-Holtenau. Oldenburger 3D-Tage 2014, Photogrammetrie-Laserscanning Optische 3D-Messtechnik. Th Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag, Berlin und Offenbach
Willemsen, T., Keller, F., Sternberg, H. 2014
Fusionierung von im Smartphone verbauten Sensoren zur Innenraumpositionierung - ein Ansatz mit Kalman-Filter. Oldenburger 3D-Tage 2014, Photogrammetrie-Laserscanning Optische 3D-Messtechnik. Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach
Keller, F., Willemsen, T., Sternberg, H. 2014
Modulares Mobile-Mapping-System für Forschungsanwendungen im In- und Outdoorbereich, in Wieser, A. (Ed.), Ingenieurvermessung 14: Beiträge zum 17. Internationalen Ingenieurvermessungskurs Zürich, 2014, neue Ausg., Wichmann, H, Berlin, pp. 171-183
Keller, F., Leitz, S., Kagerah, S., Thie, G., Sternberg, H. 2014
Current development in the HCU Mobile Mapping Systems and its use in research and teaching (6995). Proceedings of the XXV FIG International Congress 2014, Kuala Lumpur, Malaysia
Willemsen, T., Keller, F., Sternberg, H. 2014
(278) Concept for building a smartphone based indoor localization system
FUSION 07.-10.07.2014, Salamanca, Spain.
See more at: http://www.fusion2014.org/programme#
Schwieger, V., Sternberg, H. 2014
Multi-Sensor-Systeme in der Ingenieurgeodäsie - Grundlagen und Überblick
138. DVW-Seminar 18./19.09.2014, Hamburg, Schriftenreihe des DVW, Band 75/2014
Willemsen, T., Keller, F., Sternberg, H. 2014
Indoor-Positionierung und -Navigation mit Smartphone
138. DVW-Seminar 18./19.09.2014, Hamburg, Schriftenreihe des DVW, Band 75/2014
Willemsen, T., Keller, F., Sternberg, H. 2014
Concept for Building a MEMS Based Indoor Localization System
5th International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2014, October 27-30, Busan, Korea http://ieeexplore.ieee.org/xpl/mostRecentIssue.jsp?punumber=7269216
Willemsen, T., Keller, F., Sternberg, H. 2014
Museum of the Moment - A Cooperation Project Between Metropolitan Culture and Geomatics
5th International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2014, October 27-30, Busan, Korea http://ieeexplore.ieee.org/xpl/mostRecentIssue.jsp?punumber=7269216
2013
Mechelke, K., Sternberg, H. Keller, F. 2013
A Monitoring Sytsem with TLS Sensor. Proceedings of the 2nd Joint International Symposium on Deformation Monitoring, Nottingham UK, jisdm2013_submission_153. September 2013
Acevedo, C. Brenner, J., Willemsen, T., Sternberg, H., Schramm, T. Zobel, K., Temme, M., 2013
3d Modellierung aus einer Laserscannaufnahme kombiniert mit Luftbildern aus einem Oktokopter. Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2013,Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 68-77.
Keller, F, Sternberg, H. 2013
Multi-Sensor Platform for Indoor Mobile Mapping: System Calibration and Using a Total Station for Indoor Applications. Remote Sens., 2013, 5, 5805-5824; doi:10.3390/rs5115805, ISSN 2072-4292
Keller, F., Sternberg, H. 2013
Kombination von Hydrographie und Terrestrischen Laserscannern - Systematische Effekte, Kalibrier- und Auswertemethoden. Hrsg.: Bundesanstalt für Gewässerkunde: Neue Entwicklungen in der Gewässervermessung, Kolloquium am 20.21. November 2012 in Koblenz., Mai 2013, 104 S.; DOI: 10.5675/BfG_Veranst_2013.5
Keller, F., Willemsen, T., Sternberg, H. 2013
Generation of reference data for Indoor Navigation by INS and laser scanner
4th International Conference on Indoor Positioning and Indoor Navigation (IPIN), October 2013, Montbéliard, France
Sternberg, H., Keller, F., Willemsen, T. 2013
Nutzung von Smartphones in der Indoor Navigation, in Hanke/ Weinhold (Hrsg.), 17. Internationale Geodätische Woche Obergurgl 2013, Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 216-227
Sternberg, H., Keller, F., Willemsen, T. 2013
Precise indoor mapping as basis for coarse indoor navigation. Journal of Applied Geodesy. Band 7, Heft 4, Seiten 231–246, ISSN (Online) 1862-9024, ISSN (Print) 1862-9016, DOI: 10.1515/jag-2013-0015, November 2013
Willemsen, T., Keller, F., Sternberg, H. 2013
Untersuchungen zur Indoornavigation mittels aktueller Smartphonetechnologie. Avn 11-12/2013, S. 367-374
Willemsen, T., Keller, F., Sternberg, H. 2013
Untersuchungen zur Indoornavigation mittels aktueller Smartphonetechnologie. Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2013, Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 356-366.
Willemsen, T., Keller, F. und Sternberg, H., 2013
"Indoor-Navigation mit Smartphones", in GeoNews, Volume 1/2013, pp. 6-7, LINK: www.rmdata.de/geonews.de.64.htm
Willemsen, T., Keller, F. und Sternberg, H., 2013
"Indoor navigation using smartphones - assessing the quality of integrated sensors." in GIM-International January 2013, Volume 27, Number 1, pp. 23-27
2012
Mechelke, K., Keller, F., Sternberg, H., 2012
Ein neuartiges Monitoring-System mit TLS Sensorik. Terrestrisches Laserscanning (TLS2012), Schriftenreihe des DVW, Band 69, Beiträge zum 121. DVW-Seminar am 13. und 14. Dezember 2012 in Fulda, Wißner-Verlag, Augsburg, pp. XX
Keller, F., Willemsen, T., Sternberg, H. ,2012
Calibration of Smartphones for the use in indoor navigation, IN: 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 978-1-4673-1954-6/12/$31.0 0 ©2012 IEEE
Mechelke, K., Lindstaedt, M., Sternberg, H., Kersten, Th., 2012 Bauwerksmonitoring mit terrestrischem Laserscanning - eine Machbarkeitsstudie. Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2012, Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 55-62
2011
Lukianto, C. ,Sternberg, H., 2011
STEPPING – Smartphone-based Portable Pedestrian Indoor Navigation, In: Proceedings of the 7th International Symposium on Mobile Mapping Technology Mobile Mapping Technology (MMT 2011), 13-16 Juni 2011, Krakow, Poland
Lukianto, Ch., Sternberg, H., 2011
Custom MEMS-Based Inertial Measurement Unit For Pedestrian Navigation Use,
In: Proceedings of the 2011International Conference On Indoor Positioning And Indoor Navigation (IPIN 2011) – short papers, posters and demos, Moreira, Adriano J.C., Meneses, Filipe M.L. (eds.), Guimarães, Portugal; ISBN 978-972-8692-63-6
Lukianto, Ch., Sternberg, H., 2011
Overview of Current Indoor Navigation Techniques and Implementation Studies, FIG Working Week 2011 - Bridging the Gap between Cultures, 18-22 May 2011, Marrakech, Morocco
Acevedo Pardo, C., Ohlendieck, J., Krahwinkel, M., Sternberg, H., 2011
Material tests using the ARAMIS system: a laboratory report. Optical Measurement Systems for Industrial Inspection VII. Edited by Lehmann, Peter H.; Osten, Wolfgang; Gastinger, Kay. Proceedings of the SPIE, Volume 8082, pp. 808230-808230-11 (2011).
2010
Acevedo, C., Sternberg, H., Wilhelm, J., Schramm, T., 2010
Reconstruction of exhibits of the Egyptian collection at the Ethnological Museum in Hamburg, Germany. Fusion of Cultures - Abstracts of the XXXVIII Annual Conference on Computer Applications and Quantative Methods in Archaeology CAA 2010, J. Melero, P. Cano & J. Revelles (Eds.), Granada, Spain, pp. 313-316
Hirt, C., Guillaume, S., Wisbar, A., Bürki, B., Sternberg, H., 2010
Monitoring of the refraction coefficient in the lower atmosphere using a controlled setup of simultaneous reciprocal vertical angle measurements. Journal of Geophysical Research, Vol. 115, D21102, 14 pp., 2010, Doi:10. 1029/2010DJ014067.
Sternberg, H., Hönniger, Ch., Fessele, M., 2010
Indoor-Navigation ohne Verwendung von Infrastruktursensoren. Ingenieurvermessung 10 - Beiträge zum 16. Internationalen Ingenieursvermessungskurs München, 2010, Wunderlich, T. (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 131.
Sternberg, H., Hönniger, C., Fessele, M., 2010
Indoor Navigation without usage of infrastucture sensors - based Local Positioning System. Proceedings of the SPRING 8th International Conference on Computing, Communications and Control Technologies: CCCT 2010, Orlando, Florida, USA 2010.
2009
Kersten, Th., Mechelke, K., Lindstaedt, M., Sternberg, H., 2009
Methods for Geometric Accuracy Investigations of Terrestrial Laser Scanning Systems. Photogrammetrie - Fernerkundung - Geoinformation, Heft 4, pp. 301-316.
Sternberg, H., Fessele, M., Hönniger, Ch., 2009
Indoor Navigation without infrastructure–based Local Positioning System Proceedings of the 6th International Symposium on Mobile Mapping Technology
Mobile Mapping Serving the Information Society, 21-24 July 2009, Presidente Prudente, São Paulo, Brazil
Sternberg, H., Fessele, M., 2009
Indoor Navigation with Low-Cost Inertial Navigation System. Proceedings of the 6th Workshop on Positioning, Navigation and Communication 2009 (WPNC’09) Leibnitz Universität Hannover, Hannover, 2009. Hannoversche Beiträge zur Nachrichtentechnik, Band 0.6, ISBN: 978-1-4244-3292-9, pp. 1-4
Kersten, Th., Sternberg, H., Mechelke, K., 2009
Geometrical Building Inspection by Terrestrial Laser Scanning.
FIG Working Week 2009 - Surveyors Key Role in Accelerated Development,
Eilat, Israel, 3-8 May 2009. Civil Engineering Suveyor - The Journal of the Chartered Institution of Civil Engineering Surveyors November 2009, pp. 26-31. This is a peer review paper
Lindstaedt, M., Kersten, Th., Mechelke, K., Sternberg, H., Graeger, T., 2009
Phasen im Vergleich - Erste Untersuchungsergebnisse der Phasenvergleichsscanner FARO Photon und Trimble FX. Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2009, Th. Luhmann/Ch. Müller (Hrsg.), Wichmann Verlag, Heidelberg. pp. 53-64
Acevedo, C., Sternberg, H., Wilhelm, J., Schramm, T, 2009
Rekonstruktion von Exponaten der Ägyptischen Sammlung des Völkerkundemuseums Hamburg. Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2009, Th. Luhmann & Ch. Müller (Hrsg.), Wichmann Verlag, Heidelberg,
Acevedo, C., Sternberg, H., Wilhelm, J., Schramm, T, 2009
Rekonstruktion von Exponaten der Ägyptischen Sammlung des Völkerkundemuseums Hamburg. Denkmäler 3D.
2008
Hirt, Ch., Feldmann-Westenhoff, U., Böder, V., Bürki, B., Guillaume, S., Heyen, R., Stelkens-Kobsch., T., Sternberg, H., 2008
Präzise Höhen- und Schwerefeldbestimmungen an Stromübergängen und Meerengen.
Geoinformationen für die Küstenzone. Beiträge des 2. Hamburger Symposiums zur Küstenzone 2008,Traub, K.-P., Kolhus, J. (Hrsg.) (in Druck)
Kersten, Th., Mechelke, K., Lindstaedt, M., Sternberg, H., 2008.
Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems.
(2785 - TS2D) , Proceedings of the FIG working week 2008 Stockholm
Kersten, Th., Sternberg, H., Mechelke, K., Lindstaedt, M., 2008
Datenfluss im terrestrischen Laserscanning - Von der Datenerfassung bis zur Visualisierung.
Terrestrisches Laserscanning (TLS2008), Beiträge zum 79. DVW-Seminar am 6. und 7. November 2008 in Fulda, Schriftenreihe des DVW, Band 54, Wißner-Verlag, Augsburg, pp. 31-56
Schiewe, J., Krek, A., Peters, I., Sternberg, H. & Traub, K.-P., 2008
HCU Research Group "Digital City": Developing and Evaluating Tools for Urban Research.
In: Ehlers, M. et al. (Hrsg.): Digital Earth Summit on Geoinformatics 2008: Tools for Global Change Research. Wichmann-Verlag, 239-244.
Sternberg, H., Krebs, Ch. 2008
New Perspectives for Geomatics Bachelor and Master Education at the HafenCity University, Hamburg.
(2972 - TS6H), Proceedings of the FIG working week 2008 Stockholm.
Sternberg, H., Berthold (geb. Ramm), K., Fessele, M., 2008
Indoor Navigation with Low-Cost Inertial Navigation System.
International Symposium on LBS & TeleCartography, Salzburg, 2008.
2007
Sternberg, H. , 2007
Laserscanning 2007 - die nächste Generation der Systeme?
Terrestrisches Laserscanning (TLS).Schriftenreihe des DVW, Band 53. Beiträge zum 74. DVW-Seminar am 05/06.12.2007 in Fulda, Wißner-Verlag, Augsburg. pp. 15-126.
Sternberg, H., Schwalm, Chr. , 2007.
Qualifizierung von Drehratensensoren für Fahrzeugnavigationssysteme
zfv - Zeitschrift für Geodäsie, Geoinformation und Landmanagement,132. Jahrgang, Heft 5/2007, pp. 277-284.
Sternberg, H., Kersten, Th., 2007
Comparison of Terrestrial Laser Scanning Systems in Industrial As-Built-Documentation Applications,
Proceedings of 8th Conference on Optical 3D Measrurement techniques, (Eds. Gruen/Kahmen), Zurich, July 9-12, Vol. I, pp.389-397
Sternberg, H., Schwalm, Chr., 2007
Qualification Process for MEMS gyroscopes for the use in navigation systems. Proceedings of the Symposium Mobile Mapping Technologie (MMT07), Padua.
Sternberg, H., 2007
Geomatics Bachelor and Master Education at the HafenCity University Hamburg.
The Third International Exhibition and Scientific Congress Geo-Siberia-2007, Novosibirsk, T1, pp. 59- 67
Sternberg, H., Braunroth, M., 2007
Vergleichende Untersuchung von Laserscansystemen und deren Auswertesoftware bei der Modellierung eines Umspannwerkes.
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2007, Th. Luhmann & Ch. Müller (Hrsg.), Wichmann Verlag, Heidelberg, pp. 234-243.
</align><//align></align><//align>
2006
Andree, P., Böder, V., Bruns, P., .Egge, D., Sternberg, H., 2006
New Developments for the Professional Education in Hydrography at HafenCity University Hamburg (HCU). XXIII International FIG Congress “Shaping the Change”, Munich, Germany, October 8-13, www.fig.net/pub/fig2006/papers/ts05/ts05_03_andree_etal_0468.pdf
Kanngieser, E., Sternberg, H., 2006
Geomatik- und Hydrographie-Studium an der HafenCity Universität.
zfv - Zeitschrift für Geodäsie, Geoinformation und Landmanagement,
131. Jahrgang, Heft 2/2006, pp. 80-86.
Kersten, Th., Sternberg, H., Stiemer, E., 2006
Terrestrisches 3D-Laserscanning im Hamburger Rathaus - Mensi GS100 und IMAGER 5003 im Vergleich.
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2006, Th. Luhmann & Ch. Müller (Hrsg.),
Wichmann Verlag, Heidelberg, pp. 185-195.
Mechelke, K., Sternberg, H., Kersten, Th., 2006
Bauwerksuntersuchungen durch terrestrisches Laserscanning mit dem Mensi GS100.
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2006, Th. Luhmann & Ch. Müller (Hrsg.),
Wichmann Verlag, Heidelberg, pp. 308-315.
Full paper as an Acrobat file. (3dtage2006_mechelke_sternberg_kersten.pdf, 2093 kb)
Sternberg, H., 2006
Deformation Measurements at Historical Buildings with the Help of Three-Dimensional Recording Methods and Two - Dimensional Surface Evaluations. The 12th FIG Symposium on Deformation Measurement and the 3rd IAG Symposium for Geotechnical and Structural Engineering,
H. Kahmen & A. Chrzanowski (Editors), Baden, Austria, 22-24 May 2006
Full Paper as an Acrobat file, 2.5 Mb.
Sternberg, H., 2006
Deformation Measurements at Historical Buildings with Terrestrial Laserscanners.
International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XXXVI, Part 5, Editors: H.-G. Maas, D. Schneider, Peer-Reviewed Proceedings of the ISPRS Commission V Symposium „Image Engineering and Vision Metrology“, Dresden, Germany, 25-27 September, pp. 303-308.
Full Paper as an Acrobat file.
Sternberg, H., Andree, P., Wendt, G., 2006
New Approaches Supporting Hydrographical Education.
Hydro INTERNATIONAL, June, Volume 10, Number 5.
2005
Kersten, Th., Sternberg, H., Mechelke, K., Lindstaedt, M., 2005
Zur Objektgenerierung in Punktwolken des terrestrischen Laserscanners Mensi GS100 mit der
Modellierungssoftware 3Dipsos.
Terrestrisches Laserscanning (TLS). Schriftenreihe des DVW, Band 48. Beiträge zum 65. DVW-Seminar am 21./22.11.2005 in Fulda, Wißner-Verlag, Augsburg. pp. 127-146.
Kersten, Th., Sternberg, H., Mechelke, K., 2005
Investigations into the Accuracy Behaviour of the Terrestrial Laser Scanning System Mensi GS100.
Optical 3-D Measurement Techniques VII, Gruen/Kahmen (Eds.), Vienna 2005, Vol. I, pp. 122-131.
Full paper as an Acrobat file. (o3d_vienna2005_ker_ste_mech.pdf, 459 kb)
Kersten, Th., Sternberg, H., Stiemer, E., 2005
Terrestrisches 3D-Laserscanning im Hamburger Rathaus - Mensi GS100 und IMAGER 5003 im Vergleich.
Publikationen der Deutschen Gesellschaft für Photogrammetrie, Fernerkundung und Geoinformation e.V., Band 14, Hrsg. E.Seyfert, Vorträge der 25. Wissenschaftlich-Technischen Jahrestagung der DGPF, 21.-23. September 2005 in Rostock, pp. 309 - 318.
Full paper as an Acrobat file. (dgpf2005_kersten_sternberg_stiemer.pdf, 977 kb)
Kersten, Th., Sternberg, H., Stiemer, E., 2005
First Experiences with Terrestrial Laser Scanning for Indoor Cultural Heritage Applications using Two Different Scanning Systems.
IAPRS, Vol. XXXVI, PART 5/W8, Editors R. Reulke & U. Knauer, Proceedings of the ISPRS working group V/5 'Panoramic Photogrammetry Workshop', Berlin, Germany, February 24-25, 2005,
Full paper as an Acrobat file. (2panows_berlin2005.pdf, 922 kb)
Sternberg, H., Kersten, Th., Conseil, N. 2005
Untersuchungen des terrestrischen Laserscanners Mensi GS 100 - Einfluss unterschiedlicher Oberflächeneigenschaften auf die Punktbestimmung.</align><//align> </align><//align>
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2005,
Th. Luhmann (Hrsg.), Wichmann Verlag, Heidelberg.</align><//align>
2004
Sternberg, H., Kersten, Th., Jahn, I., Kinzel, R., 2004
Terrestrial 3D Laser Scanning - Data Acquisition and Object Modelling for Industrial As-built Documentation and Architectural Applications.
The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXV, Commission VII, Part B2, pp. 942-947, presented paper at the XXth ISPRS Congress, Istanbul, July 2004.
Full paper as an Acrobat file. (istanbul2004_laser.pdf, 1605 kb)
Kersten, Th., Sternberg, H., Mechelke, K., Acevedo Pardo, C., 2004
Terrestrial laser scanning system Mensi GS100/GS200 -
Accuracy tests, experiences and projects at the Hamburg University of Applied Sciences.
IAPRS, Vol. XXXIV, PART 5/W16, Editors H.-G. Maas & D. Schneider, Proceedings of the ISPRS working group V/1 'Panoramic Photogrammetry Workshop', Dresden, Germany, February 19-22, 2004,
Full paper as an Acrobat file. (dresden2004_gs100.pdf, 794 kb)
Kersten, Th., Sternberg, H., Mechelke, K., Acevedo Pardo, C., 2004
Terrestrischer Laserscanner Mensi GS100/GS200 - Untersuchungen und Projekte an der HAW Hamburg.
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2004,
Th. Luhmann (Hrsg.), Wichmann Verlag, Heidelberg, pp. 98-107.
Full paper as an Acrobat file. (oldenburg_2004_1.pdf, 1577 kb)
2002
Sternberg, H., Caspary, W. (2002)
Fahrzeugtrajektorie und Trasse als Ergebnisse kinematischer Vermessung. ZfV, 137.Jg, H.5, S. 298-304.
Sternberg, H. (2002)
Entwicklung des kinematischen Vermessungssystems KiSS. Heister, H., Reinhard, W. (Hrsg.) Beiträge anlässlich des 65. Geburtstages von Wilhelm Caspary. Institut für Geodäsie, Universität der Bundeswehr München, Neubiberg.
2001
Heister, H., Caspary, W., Klemm, J., Sternberg, H. (2001)
KiSS, ein hybrides kinematisches Messsystem. Aus: Deutsche Gesellschaft für Ortung und Navigation (Hrsg.) PosNAV 2001, DGON Symposium Positionierung und Navigation, S 237-245, Dresden.
Sternberg, H., Nussrainer, C. (2001)
Global Positioning System (GPS) in der Verkehrsplanung – Empirische Ermittlung von Fahrkurven. In: TIS – Tiefbau, Ingenieurbau, Straßenbau H. 12, S. 28 – 34.
Sternberg, H., Caspary, W., Heister, H., Klemm, J. (2001)
Mobile Data Capturing on Roads and Railways utilizing the Kinematic Survey System KiSS. Proceedings of The 3rd International Symposium on Mobile Mapping Technology, Kairo, Ägypten, Session 6 – paper 4.
Full paper as an Acrobat file. (mms2001_sternberg.pdf, 2094 kb)
2000
Caspary, W., Heister, H., Klemm, J., Sternberg, H. (2000)
Straßenaufnahme durch kinematische Vermessung. Aus: Schnädelbach, K., Schilcher, M. (Hrsg.) Ingenieurvermessung 2000, S. 304-310, Verlag Konrad Wittwer, Stuttgart.
Chen, G., Sternberg, H. (2000)
Einsatz des Kalman-Filters zur kinematischen Positionierung eines Landfahrzeuges aus GPS-Daten. Aus: Caspary, W. Heister, H. Welsh, W. Schödlbauer, A. (Hrsg.): 25 Jahre Institut für Geodäsie, Schriftenreihe des Studiengangs Geodäsie und Geoinformation, UniBwM, Heft 60 Band 1, Neubiberg.
Gräfe, G., Klemm, J., Sternberg, H. (2000)
Das kinematische Vermessungssystem KiSS: Zentrierung der Sensordaten und Transformation in das Fahrzeugsystem. Aus: Caspary, W. Heister, H. Welsh, W. Schödlbauer, A. (Hrsg.): 25 Jahre Institut für Geodäsie, Schriftenreihe des Studiengangs Geodäsie und Geoinformation, UniBwM, Heft 60 Band 1, Neubiberg.
Sternberg. H. (2000)
Zur Bestimmung der Trajektorie von Landfahrzeugen mit einem hybriden Meßsystem. (Dissertation) Schriftenreihe des Studiengangs Vermessungswesen der Universität der Bundeswehr München, Heft 67, 156 S., Neubiberg
Wang, J., Sternberg, H. (2000)
Modellentwicklung für die kinematische Vermessung von Landverkehrswegen. Aus: Caspary, W. Heister, H. Welsh, W. Schödlbauer, A. (Hrsg.): 25 Jahre Institut für Geodäsie, Schriftenreihe des Studiengangs Geodäsie und Geoinformation, UniBwM, Heft 60 Band 1, Neubiberg.
1999
Sternberg, H., Caspary, W., Heister, H. (1999)
Filteralgorithms for Optimal Determination of Position and Attitude of the Mobile Mapping System KiSS. Proceedings of International Workshop on Mobile Mapping Technology, Bangkok, Thailand, S. 2-2-1 – 2-2-6.
1998
Merry, C.L.; Heister, H.; Barry, M.; Ellery, W.; McCarthy, T.S.; Rüther, H.; Sternberg, H. (1998)
GPS Heighting in Okavango Delta. In: Journal of Surveying Engineering, 124. Jg., H. 4, S. 145-155.
Sternberg, H., Caspary, W., Heister, H. (1998)
Mobiles Vermessungssystem KiSS. Aus: Heister, H., Sternberg, H. (Red.): Hybride Vermessungssysteme - Grundlagen und Anwendungen (Schriftenreihe des DVW 29). Wittwer Verlag, Stuttgart. S. 178-192.
Sternberg, H., Caspary, W., Heister, H. (1998b)
Determination of the Trajectory surveyed by the Mobile Surveying System KiSS. Aus: Kahmen, Brückl, Wunderlich (Hrsg.): Geodesy for Geotechnical and Structural Engineering (Tu Wien). Wien. S. 361-366.
1997
Caspary, W.; Heister, H.; Klemm, J.; Sternberg, H.(1997)
KiSS, a Data Acquisition System for Transportation Infrastructure Management Databases. Aus: Proceedings International Symposium on GIS / GPS Istanbul.
McCarthy, T.S.; Barry, M,; Bloem, A.; Ellery, W. Heister, H.; Merry, Ch.; Rüther, H.; Sternberg, H.(1997)
The gradient of the Okavango fan, and its sedimentological and tectonic implications. In: Journal of African Earth Sciences, 24. Jg., H. 1/2, S. 65-78.
1996
Sternberg, H., Caspary, W., Heister, H., Hock, C., Klemm, J. (1996)
Kinematische Anwendungen von INS/GPS. Aus: Mönicke, H. (Red.): Kinematische Meßmethoden in der Ingenieur- und Industrievermessung (Schriftenreihe des DVW 22). Wittwer Verlag, Stuttgart. S. 98-130.
1995
Caspary, W., Heister, H., Hock, Chr., Klemm, J., Sternberg, H. (1995)
The Kinematic Surveying System KiSS - Design, Mechanization, Application. Proceedings DSNS 95, The Fourth International Conference on Differential Satellite Navigation Systems, 24-28 April 1995, Bergen, Norwegen.
Caspary, W., Heister, H., Hock, Chr., Klemm, J., Sternberg, H. (1995)
A Kinemtic Survey System for Transportation Infrastructure. Proceedings International FIG Symposium Commission 6, University of Cape Town, S. 36-41, Kapstadt, Südafrika.
Heister, H., Caspary, W., Hock, C., Klemm, J., Sternberg, H. (1995)
KiSS - a Hybrid Measuring System for Kinematic Surveying. Aus: Linkwitz, K., Hangleiter, U. (Hrsg.): High Precision Navigation 95. Proceedings of the 3rd International Workshop on High Precision Navigation. Ferd. Dümmler Verlag, Bonn. S. 561-568.
Heister, H., Sternberg, H. (1995)
GPS-Messungen zur Bestimmung eines Höhenproflis des Jao/Boro Flusssystems, Okavango Delta Borswana.
Institut für Geodäsie, Universität der Bundeswehr, Neubiberg.
Hock, C., Caspary, W., Heister, H., Klemm, J., Sternberg, H. (1995)
Architecture and Design of the Kinematic Survey System KiSS. Aus: Linkwitz, K., Hangleiter, U. (Hrsg.): High Precision Navigation 95. Proceedings of the 3rd International Workshop on High Precision Navigation. Ferd. Dümmler Verlag, Bonn. S. 569-576.
1994
Sternberg, H., Caspary, W. (1994)
Determination of Alignment Elements of surveyed Routes for Geographical Information Systems. Aus: Cannon, M.E., Lachapelle, G. (Hrsg.): International Symposium on Kinematic Systems in Geodesy, Geomatics and Navigation. Banff, Canada. S. 98-130.
1993
Sternberg, H. (1993)
Meßgrößen und Beobachtungsverfahren für GPS-Messungen. Aus: Institut für Geodäsie (Hrsg.): Das Global Positioning System im praktischen Einsatz der Landes- und Ingenieurvermessung. Schriftenreihe des Studiengangs Vermessungswesen, UniBwM, Heft 45. Neubiberg. S. 85-105.
1986
Sternberg, H. (1986)
Untersuchungen zum Orientierungsverhalten der raumstabilisierten Trägheitsplatform mit “ESG“-Kreiseln (Diplomarbeit) als Manuskript veröffentlicht
Level 5 Indoor Navigation (BMVI)

Level 5 Indoor Navigation (L5IN) / Darstellung des Teilprojektes 'Geodäsie'
Als Bestandteil der 5G Forschungsregionen des Bundesministeriums für Verkehr und Digitale Infrastruktur (BMVI) befasst sich das Forschungsprojekt Level 5 Indoor Navigation (L5IN) mit der Realisierung einer Personenbezogenen Navigation in Innenräumen unter Einsatz des Mobilfunkstandards 5G. Das Projekt gliedert sich entsprechend seiner Komplexität in die Teilprojekte Geodäsie, Digitalisierung und Technologie.
Dreidimensionale optische Leitungserfassung (3D-OLE) (Irene und Friedrich Vorwerk Stiftung)
Dreidimensionale optische Leitungserfassung (3D-OLE)
Die regelmäßige Vermessung von unterirdischen Leitungen, die zum Transport von Gasen und Flüssigkeiten verwendet werden, ist von hoher Wichtigkeit. Hierdurch ist es nicht nur möglich die dreidimensionale Position der Leitungen in Plänen darzustellen, sondern auch die Leitung auf Beschädigungen (z.B. durch Korrosion) und einen ausreichenden Leitungsquerschnitt hin zu untersuchen.
CIAM (BMWK)
Das Bundesministerium für Wirtschaft und Energie fördert das Forschungsprojekt für vollautonome Tiefseeanwendungen, an dem die HCU durch die Professur Hydrographie und Geodäsie beteiligt ist, und investiert in die Entwicklung eines neuartigen autonomen Tauchrobotiksystems. Es soll die autonome Überwachung von Unterwasseranlagen in der Tiefsee mit einem reduzierten CO2-Fußabdruck ermöglichen.
INDEX 2017 - 2024 (BGR)

Metallsulfidvorkommen am Meeresboden - Deutsche Explorationslizenz im Indischen Ozean (INDEX)
Ziel der Erkundungen ist es, mit Hilfe moderner rohstoffgeologischer und hydrographischer Explorationstechniken Metallsulfidvorkommen zu identifizieren, die an den Austrittsstellen ehemals aktiver heißer Quellen am Meeresboden („schwarze Raucher“) entstanden sind.
Gap-Filler (Hamburger Hochbahn AG)

Der barrierefreie Umbau von denkmalgeschützten U-Bahnhaltestellen ist eine zentrale Herausforderung, welche nur mit speziell angepassten Bauteilen bewältigt werden kann. Zur Bestimmung der optimalen Bereite eines Füllmaterials zwischen Bahnsteigkante und Zug (Gap-Filler) ist ein Geosensornetzwerk entwickelt worden.
Überwachung und Steuerung von Fassadenhüllen zur Energiereduzierung

Überwachung und Steuerung von Fassadenhüllen zur Energiereduzierung
Im Bau und Betrieb werden moderne Gebäude ökologischer dadurch das leichte Werkstoffe, wie Membranen als Fassadenverkleidung verwendet werden. Diese Membranen müssen je nach Wetterlage verstellt werden, dabei die Grundspannung nicht verändert werden. Messtechnisch wird die aktuelle Spannung bestimmt und zur Steuerung angewendet.
Deformationsuntersuchungen

Historische Bauwerke müssen vor, während und nach Umbau- und Sanierungsarbeiten überwacht werden. Neben traditionellen Vermessungsverfahren der Deformationsüberwachung werden neue Verfahren eingeführt und erprobt.
DFG Förderprogramm
Die Deutsche Forschungsgemeinschaft (DFG) unterstützte die Finanzierung eines hochgenau scannenden und taktil messenden Lasertrackers. Der Lasertracker findet seit 2015 vor allem im Geodätischen Labor Anwendung. Hier wird das System zur Evaluierung der aktuellen Forschung in den Bereichen Ingenieurgeodäsie, Photogrammetrie, terrestrisches/kinematisches Laserscanning und bei der Entwicklung von Multi-Sensor-Systemen eingesetzt.
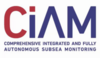
Dufek, Tanja M.Sc.
Analysis of deep-towed multi-beam echo sounder bathymetry and backscatter data along the Central and Southeast Indian Ridges and associated seafloor massive sulfides in the Indian Ocean.
In 2015, BGR (Bundesanstalt für Geowissenschaften und Rohstoffe / Federal Institute for Geosciences and Natural Resources) signed an exploration license with the International Seabed Authority for polymetallic seafloor massive sulfides (SMS) in the Indian Ocean. Within this INDEX project (INDian ocean EXploration), annual cruises to the German license area are conducted where various scientific equipment is utilized to collect geophysical, geological, geochemical, and biological information.
A major focus is detection and investigation of active and inactive hydrothermal vent sites (“black smoker”) and deposited sulfides in their vicinity. To derive high-resolution bathymetry data from the seabed, the deep-towed sled HOMESIDE is deployed in prospective areas of interest. HOMESIDE is equipped with a multi-beam echo sounder (MBES) and towed at an altitude of approximately 120 m above the seabed resulting in terrain models with about 2 m resolution on the ground. These terrain models are interpreted for geological modeling and identification of potential SMS deposits. Besides bathymetric information, also water column and backscatter data is collected by the MBES. The water column data helps locating plumes of active venting sites (“black smoker”) and the backscatter data, which complement the bathymetric data, supports the identification of the extent of sulfide deposits.
Within this thesis HOMESIDE data will be analyzed to evaluate the identification and characterization of hydrothermal vent sites and the corresponding sulfide deposits. It will mainly focus on the backscatter data and the assessment of processing and analyzing methods to improve the identification and demarcation of the surficial extent of sulfides. The outcome will be implemented into a general exploration concept for the identification of seafloor massive sulfides.
Further information regarding the INDEX project of BGR can be found here.
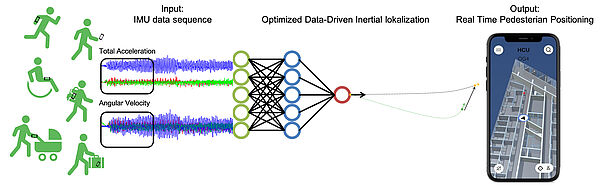
Shoushtari, Hossein M.Sc.
Data Driven Inertial Localization, Optimized by 5G Positioning
In the realm of smartphone-based pedestrian positioning, the challenge lies in achieving performance comparable to GNSS solutions indoors, taking into account the limitations of smartphone sensors and the diverse ways in which individuals may carry their devices. To tackle this challenge, we present a data-driven inertial localization method that employs deep learning to predict relative displacement based on IMU data. This approach involves learning and regressing a velocity vector using historical motion and position sensor data.
Our study incorporates traditional feature engineering-based shadow machine learning techniques alongside modern transformer models designed for processing sequential input data. These methodologies are integrated with both real and simulated 5G positioning data, employing an extended Kalman Filter optimization approach. This optimization fine-tunes the relative displacement obtained from inertial localization using absolute positioning methods, such as 5G Uplink Time Difference of Arrival positioning. In the concluding phase of our study, we thoroughly evaluate and benchmark the proposed methodology against predefined metrics, providing a comprehensive assessment of its effectiveness. Further down the visual summary of the dissertation.
Eppinger, Günter Dipl.-Umweltwiss. Dipl.-Ing.
Geosensornetzwerk mit Radarinterferometrie
In den letzten Jahren hat sich ein breites Einsatzfeld für Methoden der terrestrischen Interferometrie mittels Radartechnik entwickelt. Für das Monitoring der Standsicherheit von Ingenieurbauwerken sowie die Überwachung natürlicher Phänomene wie Vulkanismus, Hangrutschungen, Verwerfungen etc. kommen dafür speziell für diesen Zweck entwickelte und somit recht teure Messgeräte einiger weniger Hersteller zum Einsatz. Dabei spielen die Genauigkeit der Auswertung und die zeitliche Auflösung eine nicht unerhebliche Rolle.
Gleichzeitig haben sich im Bereich der Geosensornetzwerke interessante technische Entwicklungen und Fortschritte ergeben. So lassen sich auf Basis quasi-standardisierter Hardware (z.B. ARDUINO Plattform) kostengünstige Netzwerkknoten konstruieren, die in der Lage sind sowohl Steuerungsaufgaben als auch Auswertungen in einer heterogenen und verteilten Umgebung zu übernehmen.
Diese Arbeit befasst sich mit der Erforschung der Möglichkeiten, die sich durch den Einsatz eines Geosensornetzwerks mit Radartechnik auf Basis eines Low Cost Ansatzes ergeben. Neu ist die Kopplung beider Technologien mit den sich daraus ergebenden interessanten Möglichkeiten für automatisierte Überwachungsaufgaben in der Ingenieurgeodäsie. Zur Realisierung werden vornehmlich Standardkomponenten eingesetzt. Das trifft insbesondere auf das Geosensornetzwerk zu; hier werden Einplatinencomputer der ARDUINO-Plattform sowie bereits vorhandene oder im Rahmen der Arbeit noch zu entwickelnde Erweiterungsbaugruppen verwendet (diese Erweiterungen werden innerhalb der ARDUINO Community "Shields" genannt).
Es sollen messtechnische Möglichkeiten ermittelt und empirisch in Labor- und Feldexperimenten erprobt werden, die durch die Verwendung eines Geosensornetzwerks zusammen mit einem Radar-Interferometer entstehen, um zusätzliche Einsatzfelder für diese Technologie zu erschließen.
Veröffentlichungen:
Eppinger, G.; Keller, F.; Sternberg, H.:
Geosensornetzwerk mit Radartechnik
In: Niemeier, W; Riedel, B. (Hrsg.): Tagungsband Geomonitoring 2016,
3. bis 4. März 2016 in Braunschweig, S. 89 – 107
Informationen zur Tagungsreihe GeoMonitoring sind hier abrufbar
Barnefske, Eike M.Sc.
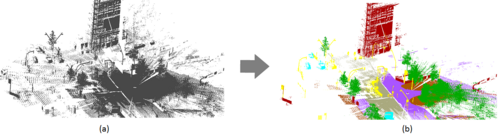
Automatisierte Segmentierung und Klassifizierung mit künstlichen neuronalen Netzen von Objekten in 3D-Punktwolken.
Die vollständige automatische Klassifikation von unstrukturierten und komplexen Punktwolken (Abb. 1a) ist mit aktuellen Algorithmen nicht möglich. Für die Weiterverarbeitung von Punktwolken zu Modellen sind eine Trennung von verschiedenen Objekten sowie die Filterung nach korrekt und fehlerhaft gemessenen Punkten notwendig (Abb. 1b). Zur Lösung dieser Aufgabe wird der Einsatz von künstlichen neuronalen Netzen (KNN) zur automatischen Segmentier- und Klassifizierung erforscht.
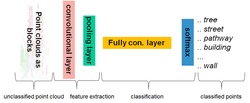
KNN ist eine Verkettung von Funktionen, welche das Ziel hat, Merkmale aus Daten zu extrahieren und diese in Sinnklassen zusammenzufassen (Abb. 2). In der Anwendung von 3D-Punktwolken wird die Beziehung zwischen einzelnen Punkten und Klassen anhand von Trainingsdaten und dem Anpassen der Netzstruktur erlernt.
Die Leistung des KNN ist primär abhängig von der Qualität der Trainingsdaten, mit denen die Gewichte zwischen den einzelnen Funktionen angepasst werden. Die Schwerpunkte dieser Forschung sind:
-Die Untersuchung des Einflusses von Trainingsdaten auf die Klassifizierungsqualität.
-Die Untersuchung des Einflusses von fehlerhaft gemessenen Punkten in den Trainingsdaten auf die
Klassifizierungsqualität.
-Die Untersuchung des Einflusses der Aufnahmesensoren auf die erreichbare Klassifikationsqualität.
-Die Entwicklung von Verfahren zur zuverlässigen und effizienten Erstellung von größeren
Trainingsdatensammlungen.
-Die Untersuchung und Adaption von Netzwerkarchitekturen für komplexe Klassifizierungsaufgaben in der
Geodäsie
-Die Entwicklungen eines Rahmenprozesses zur automatischen Klassifikation von unbekannten 3D-
Punktwolken.
Ibrahim Onoja, Pius Dipl.-Ing. (DAAD-Stipendiat)

Developing Bathymetric Information System of River Niger for Inland Water Transportation and Navigation in Nigeria.
There has been a renewed interest of the Nigerian governments in water transport and navigation to boost and enhance its industrial, international maritime and socio-economic services, which led to an award of the dredging contract of the Niger River from Baro to Warri in September 2009 (Ojigi et al., 2010). The Nigerian transportation network is in a serious need of renewal and redesign to support the increasing population and traffic on all modes of transportation. It has been observed that since the existence of the river, the river bed has not been surveyed to determine the nature and the configurations of the bed at a stretched. The width and length of the river at different sections as not be exactly identified though a dynamic entity. The dredging of the Niger seems to be a complex difficulty for government, hence the need to survey the underwater topography in order to boost its services to humanity. The hydrography survey of the river will assess what type and size of ships, barges, boats or vessels it can support for navigation. The amount of material to be dredged can be determined at each section of the stretch, and this may help private and public participation in revamping the Nigerian transportation system.
The Niger River is the principal river of western Africa, extending about 4,180 km. Its drainage basin is 2,117,700 km2 in area. Its source is in the Guinea Highlands in southeastern Guinea. It runs in a crescent through Mali, Niger, on the border with Benin and then through Nigeria, discharging through a massive delta, known as the Niger Delta of the Oil Rivers, into the Gulf of Guinea in the Atlantic Ocean. The Niger is the third-longest river in Africa, exceeded only by the Nile and the Congo River (also known as the Zaïre River). Its main tributary is the Benue River. In September 2009, the Nigerian government commenced a 36 billion naira dredging of the Niger River from Baro to Warri, a move which will see silt removed from several hundred kilometers. About 572 kilometers of the lower River Niger will be dredged, passing through 152 communities spread across eight states of Kogi, Niger, Anambra, Imo, Delta, Rivers, Edo and Bayelsa. The dredging project will certainly help to decongest the ports in Lagos and Port Harcourt and at the same time reduce pressure on Nigerian roads most of which are already in various states of disrepair. River ports will be built in various locations at Lokoja, Oguta Lake, Degema, Onitsha, Owerrinta jetty, Ndoni Jetty, Idah, Baro, Ondo waterways and Idogo (Ojigi et al, 2010).
Inland coastline hydrographic surveying involves continuous relation with bank or shore land topography. Meanwhile hydrography is the survey of the underwater topography by the application of bathymetric survey as state by (Samaila-Ija et al, 2014). The data observed can be plotted as a contouring of elevations (especially inland) or depressions (depths) from sea (or water) levels. The choice of presentation is dependent on the viewer’s requirement as the plotters limits available. Usually this is the basis of software programming for hydrography. For the purpose of transportation, the river bed topography provides a view of the water corridor as a vessel container, be it ships, boats or barges. This is why this study is surveying the corridor to explore the vessel carriage (navigational) potential of the river Niger. This will enable us as a nation plan more effectively the procedure of exploiting this potential even without the heavy burden of dredging. The information which will be extracted will aid national planning. Hence the exploration is with the zeal of exploitation. It is hoped that the recommendations will be pursued to the very end of Nigerian transportation problems.
Willemsen, Thomas M.Sc. 2016
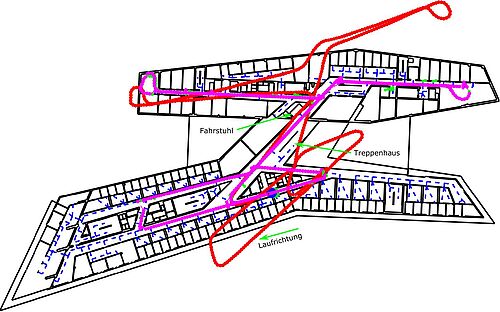
Fusionsalgorithmus zur autonomen Positionsschätzung im Gebäude, basierend auf MEMS-Inertialsensoren im Smartphone.
Eine infrastrukturbasierte Indoor-Navigation in GNSS abgeschatteten Bereichen bringt üblicherweise einen hohen Implementierungs-, Wartungs- und Kostenaufwand mit sich. Die Entwicklung einer Alternative, die praktikabel, kostengünstig und leicht verfügbar ist, ist daher wünschenswert. Um diesen Anforderungen gerecht zu werden, wird in der vor- liegenden Arbeit am Beispiel der Testgeräte Samsung Galaxy Nexus sowie Google Nexus 4 die Tauglichkeit moderner Smartphones für eine weitgehend autonome Positionsschät- zung innerhalb von Gebäuden untersucht. Dazu wird eine rein auf MEMS-INS-basierte Positionsschätzung umgesetzt, die eine Übertragbarkeit auf andere Gebäude erlaubt und Insellösungen für nur ein Gebäude vermeidet. Analysiert werden dazu drei Algorithmen auf Basis von Kalman Filter, Partikelfilter und Zustandsabfragen auf einem Routing-Graph im Hinblick auf die Verarbeitung stochastisch unterschiedlicher Messdaten, aus denen sich ein Fusionsalgorithmus für eine auf Inertialsensoren basierte Positionsschätzung entwi- ckeln lässt. Sensoren, die dazu von Interesse sein können, sind Beschleunigungsmesser, Magnetfeldsensor, Gyroskop und Barometer. Sie werden hinsichtlich der Messeigenschaf- ten untersucht und, sofern erforderlich, für Navigationszwecke kalibriert. Zudem wird eine Abgrenzung der verwendeten Zusatzinformationen aus der gegebenen Infrastruktur, wie beispielsweise Kartenmaterial, Routing-Graph, W-LAN Netzwerk etc., vorgenommen. Bei der praktischen Umsetzung in einem Testgebäude wird eine Implementierung als Naviga- tionsapplikation mit Routing und Kartengrundlage diskutiert. Für das Routing werden zwei Algorithmen untersucht sowie Ansätze für die automatische Erstellung von Karten- und Routing-Daten vorgestellt. Insgesamt lässt sich festhalten, dass sich die untersuchten Testgeräte ohne gesonderte Kalibrierung einsetzen lassen. Kalman Filter, Partikelfilter und topologischer Ansatz arbeiten im Prinzip so zuverlässig, dass sie unter kontrollier- ten Testbedingungen gute Ergebnisse erzielen. Kalman Filter und Partikelfilter generie- ren durch Positionskorrekturen mittels Routing-Graphen in bestimmten Bereichen, etwa in Eingangshallen, Unsicherheiten. Der topologische Ansatz funktioniert lediglich auf ei- nem Routing-Graph und verfälscht die Positionsschätzung, sobald der Nutzer vom dem definierten Weg abweicht. Der hier favorisierte Filter auf Basis von Partikelfilter und to- pologischem Ansatz minimiert solche Schwächen und erlaubt die Positionsschätzung im gesamten Testgebäude. Anhand von 46 Datensätzen kann demonstriert werden, dass der Algorithmus in 70 Prozent der Fälle die Zielgenauigkeit der Positionsschätzung von <5 m einhält – je nach Handhabung des Smartphones während der Navigation. Somit ist in Abhängigkeit des Nutzerverhaltens eine Positionsschätzung im Gebäude generell ohne weitere infrastrukturbasierte Korrekturen möglich.
Keller, Friedrich M.Sc. 2015
Entwicklung eines forschungsorientierten Multi-Sensor-Systems zum kinematischen Laserscanning innerhalb von Gebäuden.
Digitale dreidimensionale Modelle sind aus einer Vielzahl von Anwendungsbereichen nicht mehr wegzudenken, die Aufnahme der zu Grunde liegenden Messdaten ist allerdings häufig zeitaufwendig vor allem bei Gebäuden. Um die Vorteile der hohen Aufnahmegeschwindigkeit und gleichmäßigen Punktwolke des kinematischen Laserscannings von straßengebunden Anwendungen auf Anwendungen im Inneren von Gebäuden zu übertragen sind neue Verfahren und Algorithmen notwendig. Diese müssen den Wegfall von GNSS, die einen nicht unerheblichen Teil der Positionsbestimmung ausmachen, kompensieren.
In dieser Dissertation wird eine modulares Messsystem konzipiert und entwickelt, das kinematisches Laserscanning von verschiedenen Plattformen (Auto, Schiff, Handwagen) ermöglicht. Dabei werden die verschiedenen Aspekte solcher Mobile-Mapping- bzw. Multi-Sensor-Systeme analysiert.
Es wird eine Plattform entwickelt, die verschiedene Sensoren in beliebiger Anordnung miteinander kombinierbar macht. So wird Forschern ermöglicht unterschiedliche Algorithmen für die Positionsbestimmung und Auswertung von Aufnahmesensoren zu erforschen.
Ein Aspekt der näher betrachtet wird ist die Kalibrierung des Messsystems und ihr Einfluss auf die Endergebnisse die sich auch mehreren Sensoren berechnen. Dazu werden verschiedene Kalibrierverfahren und Algorithmen untersucht und bewertet. Um den Wegfall des GNSS beim Einsatz in Gebäuden zu kompensieren wird sowohl die Eignung einer Totalstation, als auch der Einsatz eines horizontalen Laserscanners untersucht. Ein Schwerpunkt bildet die Betrachtung der bekannten zeitlichen Unsicherheit von Koordinaten die mit der Totalstation gewonnen werden. Für den horizontalen Laserscanner werden zur Positionsschätzung Verfahren aus dem Bereich SLAM verwendet.
Um die Einsatzfähigkeit dieser Sensoren zu beurteilen wird ein Filter entwickelt. Mit diesem ist es möglich die Position und Orientierung (Pose) des Messsystems in Innenräumen in einem vorgegebene Koordinatensystem zu bestimmen. Dabei werden Extendet Kalman Filter und Unscented Kaiman Filter sowie verschiedene Bewegungsmodelle evaluiert.
Abschließend wird in verschiedenen Szenarien das Messsystem und das Filter für die Anwendung im Gebäude untersucht und beurteilt. Dabei werden die Unsicherheitsinformationen der Pose, der Systemkalibrierung und des Aufnahmesensors an sich auf die aufgenommenen Punkte übertragen, sodass auch für die Massenpunkte Genauigkeiten angegeben werden können.
Brunkhorst, Matthias M.Sc. 2014
Ein allgemeines spektrales Konzept zur qualitativen und quantitativen Analyse der Verzerrung im 1. und 2. Moment von Parameterschätzungen infolge unterschiedlicher Fehler sowie Nichtlinearität im Beobachtungsmodell und Anwendung auf geodätische Netze.
In geodätischen Ortungsaufgaben und Netzlösungen erfolgt die Bestimmung der gesuchten Parameter – wie der besonders interessierenden Netzkoordinaten – erwartungstreu, falls ausschließlich zufällige beobachtungsbezogene Varianzanteile und ein fehlerfreies Modell zur Abbildung der Beobachtungen auf diese Parameter vorliegen. Das Auftreten nicht-zufälliger Fehleranteile in den Netzbeobachtungen oder den festen Anschlusskoordinaten führt ebenso wie ein nicht fehlerfreies Abbildungsmodell zu einer nicht mehr erwartungstreuen Schätzung mit geometrischen und stochastischen Netzverzerrungen wie einer gegenüber dem unverzerrten Fall ungünstigeren Parameterstochastik.
Als Ursache jener Verzerrungseffekte kommen neben deterministisch-systematischen Fehlern der verwendeten Anschlusspunkte sowie möglichen Vernachlässigungen in deren stochastischen Modell noch die beobachtungsbezogenen deterministisch- und stochastisch-systematischen Fehleranteile in Betracht, durch die darüber hinaus auch Korrelationen zwischen den Netzbeobachtungen und somit Kovarianzanteile verursacht werden. In geodätischen Lagenetzen wirken darüber hinaus Fehler im Abbildungsmodell der Beobachtungen quasi-systematisch auf die Parameter aufgrund der Nicht-linearität des Modells und der so erforderlichen Linearisierung (Nichtlinearitätsverzerrungen ab der 2. Ordnung). Alle jene systematischen Fehleranteile führen auf eine geometrische (Parameterbias) und eine stochastische (Kovarianzmatrixzuschlag) Netzverzerrungskomponente.
Die Anwendung des allgemeinen Eigenwertproblems (AEWP) auf jene parameterbezogene Zuschlags-matrix als Vergleichskovarianzmatrix und mit der konventionellen Kovarianzmatrix der Parameter als Referenzkovarianzmatrix im Rahmen des spektralen Analysekonzepts erlaubt die spektrale Zerlegung der Zuschlagsmatrix unter Bezugnahme auf die Referenzkovarianzmatrix und liefert über die AEWP- Eigenwerte und die zugehörigen Eigenvektoren die latenten Schwachformen des untersuchten Netzes als Trägerfunktionen der Verzerrung dessen Geometrie sowie die stochastische quadratische Netzverzerrung als quantitative Testgröße des Verzerrungseffekts.
Zur qualitativen und quantitativen Analyse der geometrischen und stochastischen Verzerrungswirkung nicht-zufälliger Fehleranteile in Nivellement- und Lagenetzen ließ sich mit Anwendung der spektralen Zerlegung einer Vergleichs- in Bezug auf eine Referenzkovarianzmatrix ein allgemeines einheitliches Konzept einschließlich Vergleichsaussagen zu unterschiedlichen Parameterstochastiken finden.
Eine konzeptionelle qualitative und quantitative Analyse von Verzerrungseffekten aufgrund von teil-weise erstmalig modellierten unterschiedlichen systematischen und stochastischen Modellfehlern in Nivellement- und Lagenetzen jeweils unterschiedlichen Designs führt über die daraus gewonnenen Erkenntnisse bezüglich der Wirkung nicht-zufälliger Fehleranteile auf Optimierungskriterien für deren Herabsetzung im Sinne einer spektralen Netzoptimierung.
Kruppa, Kai M.Sc. 2018 (HAW)
Multilinearer Entwurf dezentraler Reglernetzwerke für Gebäudeautomationssysteme.
In Deutschland werden 35% der Endenergie in Gebäudebereich verbraucht. Modellbasierte Reglerentwurfsmethoden ermöglichen die Nutzung dieses großen Energieeinsparpotenzials, um den Energieverbrauch zu reduzieren. Für lineare Zustandsraummodelle sind dazu zahlreiche Methoden bekannt. Jedoch können diese Methoden versagen, wenn nichtlineare Effekte entscheidend sind, wie im Gebäudebereich. Multilineare zeitinvariante (MTI) Modelle erweitern die lineare Modellklasse und führen zu besseren Modellierungseigenschaften, z.B. für Heizungssysteme. In heutigen Anwendungen werden die betrachteten Systeme immer komplexer. Zur Modellierung solch großen Systeme werden hier Tensorzerlegungsverfahren angewendet, um eine speicherplatzeffiziente Modelldarstellung zu erreichen. Tensormethoden werden weiterhin dazu verwendet, verschiedene Methoden zur Modellanalyse und zum Reglerentwurf zu entwickeln. Da sich MTI Modelle dazu eignen das Verhalten sehr großer Systeme zu beschreiben, werden, basierend auf der Tensorstruktur, Methoden für dezentrale und verteilte Regelungen entworfen, um den Kommunikationsaufwand und die Komplexität der Regler zu reduzieren. Die entworfenen Regler werden in der Simulation auf verschiedene Beispiele aus dem Bereich der Heizungssysteme angewendet, um deren Vorteile zu zeigen. Zudem erfolgt die erfolgreiche Echtzeitanwendung eines prädiktiven Reglers auf ein reales Bürogebäude, der die multilineare Tensorstruktur des Modells nutzt.
Lautenschlager, Björn M.Sc. 2019 (HAW)
Data-Driven Learning and Model Predictive Control for Heating Systems
Im Gebäudebereich in Deutschland werden heutzutage schon rund 40 % der gesamten Energiemenge verbraucht. Bis zu 80 % der verbrauchten Energie im Gebäudebereich wird für die Erwärmung des Gebäuden und die Warmwasserbereitung verwendet. Das bedeutet, dass der Heizungsanlage im Gebäude auf Grund des hohen Energieverbrauchs eine besondere Bedeutung zukommt. Durch den hohen Energieverbrauch ergibt sich auch ein entsprechendes Einsparpotential, welches unter anderem durch eine verbesserte Betriebsführung, wie z.B. durch die Verwendung neuartiger Regelungskonzepte, ausgenutzt werden kann.
Diese Arbeit beschäftigt sich mit der Frage, wie gesammelte und gespeicherte Messdaten, welche oftmals nur für Monitoring und Auswertungszwecke verwendet werden, für die Optimierung von Regelungen genutzt werden kann. Die entwickelten Regelungsstrategien werden am Beispiel von Heizungsanlagen getestet und die Ergebnisse ausgewertet. Es haben sich modellprädiktive Verfahren für die Regelung von Systeme mit größeren Totzeiten als besonders geeignet erwiesen. Zu solchen System gehören auch Heizungsanalgen, wobei für die modellprädiktive Regelung (model predicitve control - MPC) die Wettervorhersagen und da insbesondere die Vorhersage der Außentemperatur berücksichtigt wird. Durch die Nutzung eines Modells für die Regelung kann das zukünftige Anlagenverhalten vorausberechnet werden und so auf Änderungen in den Umgebungsbedingungen frühzeitig reagiert werden. Dabei löst der MPC ein Optimierungsproblem, welches eine Kostenfunktion minimiert unter Berücksichtigung des Anlagenverhaltens, welches durch das Model wiedergegeben wird. Aus diesem Grund ist ein Aspekt der Nutzung von Daten die Modellbildung für prädiktive Regelungsstrategien.
Anhand eines Beispiels einer Heizungsanlage wurden zwei Regelungsstrategien vorgestellt, wie sie heutzutage in der praktischen Anwendung verwendet werden. Auf der einen Seite der klassische proportionale-integrale (PI) Regler und auf der anderen Seite ein linearer MPC. Dabei gilt der PI-Regler als ein Standardregler der in vielen Anwendungsbereichen genutzt wird, auch im Bereich der Heizungssysteme. Die Ergebnisse werden für Vergleichszwecke mit den weiteren Regelungsstrategien genutzt. Sowohl der PI-Regler, als auch der lineare MPC verwenden für die Regelung eine Referenz. Eine geeignete Referenz zu finden kann mitunter aufwendig und schwierig sein.
Ein sogenannter EMPC (economic model predictive controller), welcher eben- falls ein Modell verwendet und ein Optimierungsproblem löst, unterscheidet sich vom linearen MPC zum einen durch die Art der Kostenfunktion und zum anderen wird keine Referenz für die Regelung verwendet, wodurch die Wahl einer geeigneten Referenztrajektorie wegfällt. Stattdessen wird die Optimierung unter Randbedingungen ausgeführt welche durch die Anforderungen des Systems definiert werden. So können z.B. für Heizungsanlagen die Komfortbedingungen an die Raumtemperatur mit Hilfe der Randbedingungen definiert werden. Dieser Ansatz wird zum einen um Zeitabhängige Randbedingungen erweitert und zum anderen um diskrete Stellsignale, wodurch die Anwendung eines EMPC auf Anlagen mit schaltenden Stellsignalen ermöglicht wird. Durch die Einführung von diskreten Stellsignalen wird das Optimierungsproblem zu einem gemischt-ganzzahligen Optimierungsproblem, wodurch die Lösung des Optimierungsproblems wesentlich komplexer und zeitaufwendiger wird. Der EMPC wurde auf eine Heizungsanlage angewandt und die Simulationsergebnisse mit denen des linearen MPC verglichen. Anschließend wurde der EMPC in einer realen Heizungsanlage implementiert und das Echtzeitverhalten dieser Regelung untersucht.
Die vorgestellten prädiktiven Regelungen verwenden ein lineares Modell des Systems. Wenn die Beschreibung des Systemverhaltens durch ein lineares Modell nicht ausreichend genau ist, führt dies im Allgemeinen zu nichtlinearen Modellen. Eine Unterklasse der nichtlinearen Modelle bilden die multilinearen (multilinear time-invariant MTI) Modelle. Unter Verwendung von MTI Modellen wurde die Struktur des modellprädiktiven Optimierungsproblems untersucht. Dabei stand die Konvexitätsanalyse im Vordergrund und es konnte gezeigt werden, dass das Optimierungsproblem für Unterklassen der MTI Systeme und bestimmte Vorhersagehorizonte konvex ist.
Ein weiterer Ansatz, um Messdaten zu verwenden, ist die iterativ lernen- den Regelung (iterative learning control - ILC). Dabei nutzt ein ILC die gespeicherten Daten, um das Stellsignal der nächsten Iteration zu berechnen. Es wurde ein datanbasierter ILC eingeführt und Auswahlkriterien für die Wahl eines gespeicherten Datensatzes definiert und in einem Optimierungsproblem zusammengefasst. Die Kombination eines datenbasierte ILC mit einem linearen MPC wurde vorgestellt und am Anwendungsbeispiel getestet. Der datenbasiert lernende MPC wurde in einem prototypisches Heizungssystem implementiert und erste Messdaten ausgewertet. Der daten- basierte ILC speichert die Daten von vergangen Iterationen. Um eine Anwendung eines solchen ILCs auch auf Plattformen mit wenig Speicherplatz zu ermöglichen, wurden die Messdaten in einer Tensorstruktur gespeichert und die kanonisch-polyadische (canonical polyadic - CP) Tensorzerlegung auf die Messdaten angewandt. Es konnte gezeigt werden, dass die Berechnungen des Ähnlichkeitskriteriums für die Auswahl eines historischen Datensatzes auf Basis des CP Tensors erfolgen kann und somit der benötigte Speicherbedarf um ein vielfaches gesenkt werden konnte.
Das heißt, in dieser Arbeit wurden Messdaten zum einen für die Modellbildung für prädiktive Regelungen verwendet um das zukünftige Verhalten des Systems zu berücksichtigen und zum anderen für die iterativ lernende Regelung, welche aufgrund der verwendeten Messdaten das vergangene Verhalten des Systems berücksichtigt und in die Regelung mit einfließen lässt. Die entwickelten Regelungen wurden auf Heizungssysteme angewandt und die Ergebnisse mit denen der Standardregelungen verglichen.
DVW Deutscher Verein für Vermessungswesen e.V. - AK3
DIN Deutsches Institut für Normung e.V.
DHV - Deutscher Hochschulverband
DHyG - Deutsche Hydrographische Gesellschaft e.V.
FIG/IHO/ICA International Board on Standards of Competence for Hydrographic Surveyors and Nautical Cartographers (IBSC), representing FIG
FIG Fédération Internationale des Géomètres - Internationale Vereinigung der Vermessungsingenieure
IAG International Association of Geodesy



