Prof. Dr. Harald Sternberg
Dreidimensionale optische Leitungserfassung (3D-OLE)
Die regelmäßige Vermessung von unterirdischen Leitungen, die zum Transport von Gasen und Flüssigkeiten verwendet werden, ist von hoher Wichtigkeit. Hierdurch ist es nicht nur möglich die dreidimensionale Position der Leitungen in Plänen darzustellen, sondern auch die Leitung auf Beschädigungen (z.B. durch Korrosion) und einen ausreichenden Leitungsquerschnitt hin zu untersuchen. Für die Vermessung werden zumeist sehr zeit- und kostenintensive Systeme eingesetzt, die u.a. GNSS-Empfänger und sog. Inspektionsmolche mit Ultraschall- und Magnetsensoren verwenden. Diese Methodik kann Nachteile in Bezug auf die anschließende Wartung und Reparatur der Leitung haben, wie beispielsweise durch eine Magnetisierung der Leitung.
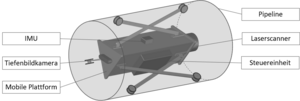
In diesem Projekt wird der Einsatz von optischen Sensoren in Kombination mit inertialen Navigationssystemen (IMU) untersucht. Die Leitungsinnenwand kann beim Durchfahren einer Leitung anhand von Aufnahmen einer Tiefenbildkamera und/ oder eines Profil-Scanners erfasst werden. Im ersten Berechnungsschritt wird eine hochauflösende farbige dreidimensionale Punktwolke berechnet, auf dessen Grundlage eine detaillierte Bewertung des Leitungsquerschnittes und eine Inspektion der Leitungsinnenwand auf Korrosion und Verformungen möglich ist. Im zweiten Berechnungsschritt werden Längsachsenmittelpunkte und Querprofile aus der Punktwolke abgeleitet, die den dreidimensionalen Verlauf der Leitung, bezogen auf die Startposition, beschreiben und diesen in einer Karte darstellen können. Mittels dieser Punkte und der Querprofile ist zudem die Berechnung von Volumenkörpern möglich, die in einem geographischen Informationssystem (GIS) oder Building Information Modelling (BIM) angewendet werden können.
Ziel des Projektes ist die Entwicklung eines hochauflösenden alternativen low-cost Vermessungs-systems, basierend auf RGB-D Bildern, Profil-Scans und inertialen Messwerten. Dieses soll durch ein Rohr mit dem Durchmesser von bis zu 50 cm bewegt werden können. Die Steuerung und Verarbeitung soll mit dem Robot Operating System (ROS) realisiert werden.
Laufzeit: 01/2021 – 12/2025
Gefördert durch: Irene und Friedrich Vorwerk Stiftung
Veröffentlichungen:
Fjodorow, G., Shoushtari, H., Sternberg, H. 2024
3D-OLE: Three-Dimensional Optical Pipeline Inspection. In: Proceedings of the 5th KuVS/GI
Expert Talk on Localization. https://doi.org/10.34712/142.51
Die Ansprechpartner seitens der HafenCity Universität Hamburg sind:
Prof. Dr.-Ing. Harald Sternberg
ab 01.2024
Hossein Shushtari, M.Sc.
bis 12.2023
Eike Barnefske, M.Sc.
Stefanie Stand, M.Sc.


